|
|
|
|
|
|
Impedance Matching. Part 4: Practical Considerations.
By David Knight G3YNH
Contents:
|
<<< Part 3. 1. Materials and components. |
2. Variable inductors. 3. General Considerations. |
|
1. Materials and components: A low-loss impedance matching network effects a transformation by means of reactive voltage or current magnification. This means that strong electric and magnetic fields are likely to be present in the vicinity of the network wiring and components. Hence, if there is one point in the power-transmission chain that requires attention to the choice of materials, it is surely the AMU. The inference of the preceding articles is that practically all of the losses are due to the inductor; but that will not be true if the rest of the network is badly designed. A stage in the transmission chain at which substantial losses can occur is, of course, the balun transformer. It is for this reason that the balun is optimally placed in the constant impedance path between the transmitter and the AMU; the point being that the characteristic resistance of the balun can then be made roughly equal to the preferred load resistance of the transmitter, and losses are brought to a minimum when a transmission-line is operated at 1:1 SWR. Such a fastidious approach is not without its privations however, particularly the inconvenience of having to float the matching network; and so the balun is often placed on the antenna side of the AMU despite the counter-indication. In truth, the antenna-side balun is not such a bad idea, but the Amateur-Radio literature since the use of ferrite-cored baluns came into vogue attests to the fact that many experimenters have difficulty in getting the scheme to work. It is here that we run into an area of widespread misconception. It has often been observed that balun chokes made by coiling ½" radio-guide (RG) cable never give any trouble in HF installations operating at about the 1 kW level; whereas antenna-side 1:1 toroidal-cored baluns sometimes overheat. This has led certain influential authors to promote the dubious notion that the problem is due to core saturation. The reality is that it takes a large coil of cable to provide sufficient choking reactance at the low end of the short-wave spectrum, and the losses will be significant if the cable is mismatched; but such a structure can easily dispose of waste heat. A balun with a magnetic core, on the other hand, can be highly efficient under conditions of severe mismatch, because the overall length of the transmission-line is short; but the small size precludes effective thermal convection. Hence the toroidal balun is by far the best choice in terms of efficiency, but it needs to be properly constructed. Most of the EMC issues associated with small HF radio installations can be resolved by using a symmetrically-fed antenna (a dipole or "doublet"). Such an antenna however has two modes of operation: the (wanted) differential mode, in which the feed-line currents for the two halves are equal and opposite; and the (unwanted) common mode, which involves currents that are the same for both halves. The most extreme provocation of the common mode is obtained by driving the two sides of the feed-line together as one antenna terminal; in which case the house wiring provides the other terminal by default. Transmitting power into the common-mode terminals is likely to disrupt the operation of nearby electronic equipment; and a receiver connected in place of a transmitter is likely to be swamped by locally-generated RF noise. The purpose of the balun is to prevent common-mode operation. A 1:1 balun (which is all that is usually required) can be constructed by taking a pair of wires and winding them bifilar for several turns around a toroidal magnetic core. This structure forms a choke, which places a substantial reactance in the path of common-mode currents, but makes little difference to the wanted differential mode. Correct operation is obtained when the choking reactance is large in comparison to the magnitude of the antenna's common-mode input impedance. One design approach is to model the antenna in common-mode using NEC and make the balun reactance at least 10 times greater than the calculated input impedance magnitude at all frequencies in the required operating range. Accurate modeling is difficult however, because all of the dielectrics, wiring and metal pipework in the near-field should strictly be included. A pragmatic solution therefore is to ensure that the reactance will always be enormous, a task facilitated by the availability of the ubiquitous Amidon (Fair-Rite) FT-240-K, a 2.4" ferrite (type K) toroid with an inductance factor (AL) of 4.9μH/turn². A balun typically used with 1.5 kW HF transmitters is made by winding 12 bifilar turns around a stacked pair of FT-240-K cores. This gives an inductance of 2 × 4.9 × 10-6 × 12² = 1.4 mH, with a corresponding choking reactance of 16 kΩ at 1.8 MHz (see illustration below). |
 |
 |
|
|
|
If the connection to the antenna is via open-wire feedline, the
best place for the balun is somewhere in the vicinity of the
AMU. Apart from that however; there is little difference in terms
of the choking effect between placing the balun on the transmitter
side or on the antenna side of the matching network. A special property of the toroidal balun is that a very large choking reactance is easily obtained. This means that there will be negligible common-mode current. The corollary is that the currents in the two wires of the transmission line will be very nearly equal and opposite, which means that the total number of flux linkages will be small. Hence, if the reactance of the balun is sufficient for the intended purpose, core saturation is not possible, and magnetic losses are not responsible for any overheating that might occur. The total number of flux linkages in the balun due to the differential-mode current is zero. Hence, the magnetic material does not form part of the transmission line (except for minor dielectric effects due to its proximity to the wires). A possible problem with the compact structure however, is that it confines a length or transmission line to a small volume, which means that overheating can occur if the line is lossy. The cause of the mysterious balun failure problem can now be identified by noting that the Amateur Radio literature abounds with articles describing the use of tin-plated PVC-covered wire for the construction of coils and transformers. The subject of materials for RF power-transmission applications is covered in detail in Chapter 2. Suffice it to say here that the RF resistance of conductors is much greater than the DC resistance, due to the skin effect, and it is the the material at the surface of any conductor that carries the bulk of the current. White tin, which is the plating used on electrical hook-up wire, has a resistivity of about 115 nΩm initially, but grows a fluff of microscopic whiskers due to stresses caused by gradual migration of the underlying copper. The whiskers encourage field-emission breakdown (flashover) and increase surface convolution, increasing the resistivity. Tin also undergoes a slow phase change to the semiconducting grey form (tin pest) if exposed to temperatures below 13 °C, and this increases the resistivity by a factor of about 25 [30]. By contrast, copper has a resistivity of about 17.4 nΩm, and silver, about 15.9 nΩm; and both materials are stable when protected from atmospheric attack. It follows that the use of tin in RF applications should be minimised (especially since good performance is secured by omitting the plating step in copper wire manufacture), and overheating is a serious risk when long tin-coated conductors are operated in a confined space. Tin conductors will give rise to excessive losses in conditions of high current-magnification, i.e., in the antenna-side balun application, when the resistive component of the load impedance is small. Surface phenomena are only part of the story however; and it is important to understand that the transfer of electromagnetic energy takes place in the space outside the conductors. Hence an additional problem occurs when the load impedance magnitude is high; in which case the required voltage magnification will be large, and there will be strong electric fields associated with some parts of the circuit. The E-field can be particularly intense in places where the two conductors of the transmission line are brought into proximity. This means that there can be large dielectric losses in the insulation coatings of bifilar differential circuits. A good measure of relative insulator performance is the loss-tangent (Tanδ) for the frequency-range of interest; where δ is the amount by which the impedance phase-angle for a capacitor made from the dielectric deviates from -90°. Shown below are some loss-tangent data for good RF insulators, with PVC for comparison: |
|
|
|
Tanδ | δ |
| Polyethylene |
|
≤ 0.0003 | < 0.17° |
| Polypropylene |
|
≤ 0.0005 | < 0.29° |
| Polystyrene |
|
0.00007 - 0.0001 | < 0.006° |
| PTFE (Teflon) |
|
≤ 0.0002 | < 0.011° |
| Plasticised PVC |
|
0.14 - 0.04 | 8 - 2.3° |
|
More information on dielectrics is given in Ch.
2 Part 6. We need only note here that the preferred insulator
for RF applications is PTFE; not only because of its low losses,
but because it has a high melting point (327 °C), it is not
affected by UV light, and it is chemically inert. Plasticised
PVC (i.e., flexible PVC, as used for wire coatings) has a loss
tangent somewhere roughly between 200 and 700 times worse than
PTFE in the HF radio range. Consequently, in situations in which
two conductors are prevented from making contact by means of
PVC insulation (such as in a transmission-line transformer) high
losses and possible catastrophic failure are to be expected. Modelling the losses in balun transformers is difficult, but most engineers will save themselves the bother by sticking to plain or silver-plated copper wires with PTFE insulation. A balun suitable for antenna-side use with 1.5 kW transmitters can be constructed using fairly thick (1.2mm diameter or larger) enamelled copper wire covered with PTFE sleeving. Another favoured approach is to use thick multi-strand silver-plated PTFE-covered copper wire. Wound onto a pair of FT-240-K cores, the result in either case is a balun that is >99% efficient when inserted into a 50 Ω line, and that is still usually more than 98% efficient with load impedance magnitudes of around 1 kΩ. If we take 98% as a fairly typical efficiency for a balun made from good materials but operating at about 20:1 SWR, a rough picture of thermal economics emerges. A 1.5 kW SSB transmitter will produce an average output of about 500 W. Hence the balun will need to dissipate about 10 W; a heat load that it can deal with comfortably because the melting point of PTFE is 327 °C, PTFE requires no plasticisers and so undergoes no chemical changes or evaporation loss on thermal cycling, and the Curie point for type K ferrite is 280 °C. Now contrast that with the situation of a balun wound with hook-up wire. The efficiency might easily be as low as 80% due to tin losses and the dielectric absorption of PVC. The balun may need to dissipate something of the order of 100 W, but it is smaller than a 100 W light-bulb, and 100 W light bulbs operate with a surface temperature greater than the boiling point of water. Un-plasticised PVC (UPVC) starts to melt at about 80 °C. Plasticised PVC has an even-lower melting point, which depends on the compounding. Softening is not necessarily a problem in materials that re-harden without change on cooling, but PVC will loose its plasticiser by evaporation and become charred and brittle. The PVC coating will eventually disintegrate, leading to failure via flashover and possible permanent short-circuit. |
|
Although losses can lead to component failure when cooling is
inadequate; all energy wastage is undesirable and should be eliminated
within reason. It would be an over-reaction to do without soldered
joints; because the losses that occur in small areas of tin surface
are generally negligible, and tin-pest is usually prevented by
inhibitors incuded in the alloy. It is also not necessary to
use high-quality dielectrics in regions of low electric field-strength.
Otherwise however, materials should be chosen carefully, and
particular attention should be paid to the minimisation of interconnection
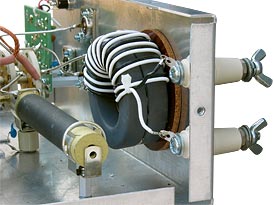
resistance. The word 'wire' should be regarded as a generic term in the context of RF power transmission. RF conductivity is a function of surface area, not volume, and so point-to-point wiring is best accomplished using flat soft-copper or silver-plated strip. For those who like to use inexpensive materials; note that bright clean offcuts of copper water-pipe can be sawn-open lengthwise, flattened with a soft mallet and deburred (to prevent field-emission breakdown and cut fingers). Strips of about 5 mm to 10 mm width and 1 mm thickness are generally suitable, and have less inductance that a round wire of comparable cross-sectional area. If insulation is required, strip can be covered with PTFE tubing; which has the advantage that it will not melt or decompose while the conductor is being soldered (although it will soften). Metal surfaces change with time, due to the action of the air. This is not a serious problem provided that the surface layer is an electrical insulator; but RF resistance will increase significantly if the conductor acquires a coat of semiconducting material. Copper retains its performance fairly well during the course of its gradual discolouration; but silver grows a semiconducting (brown-black) sulphide layer, which can render it inferior to copper. Hence silver should be protected from sulphur contamination if possible, and may benefit from periodic cleaning [31]. High resistive losses can occur at switch and brush (i.e., rotary) contacts. The use of generously-rated switches is recommended, and contacts should be made from oxidation-resistant, high-conductivity alloys of sufficient hardness to withstand wear. Electricity distrubution switchgear usually has good contacts, but is generally unsuitable for RF applications. It is possible however to salvage the contacts from scrap switches and relays and make new supports and armatures using low-loss dielectrics. Some large relays can also be re-engineered for RF use by extending the distance between the actuator solenoid and the switch armature. Vacuum relays are the preferred solution to the RF power switching problem, having the advantage of high breakdown voltage and contact surfaces that remain indefinitely pristine, but the units are expensive when purchased new. Typical high-voltage air capacitors used for HF impedance-matching applications provide connection to the rotor either via a slip-contact or through one of the bearings (and its grease). Such connections give rise to a major part of the capacitor's ESR. If the capacitor is provided with end-stops to prevent continuous rotation, connection to the rotor can be made using a short length of flexible copper or silver-plated braid (obtained from an offcut of coaxial cable). Further discussion of this subject is given in [A5.1]. |
| Vacuum capacitors make connection to the moveable electrode via a flexible high-conductivity copper bellows. This arrangement results in a very low ESR, but the advantage can be wasted if the wiring attached to the capacitor terminals is inadequate. Note that vacuum capacitors are available in shorting and non-shorting varieties, i.e., some are designed to provide a DC short-circuit at the maximum capacitance setting. This can be desirable in capacitors that are to be placed in series with a transmission line (e.g., in CLC T-networks); but not in capacitors that are to be placed in parallel. It is important to understand that, while protection circuits can save transmitter output transistors from immediate destruction, they take a millisecond or so to operate, in which time the amplifier is severly stressed. Hence circuits that can suddenly short-circuit the transmitter output should always be avoided. |
 |
|
2. Variable inductors. The modelling of HF impedance matching networks can be carried out with good accuracy in the lumped-component approximation, because the physical structures involved are small in comparison to the shortest operating wavelength (about 10m). We need to be mindful nevertheless; that the components are not ideal, that predictable behaviour depends on the minimisation of stray capacitive and magnetic coupling, and that the wiring needs to be kept short to minimise unwanted inductance. Even when good practice is followed however, there is still one component that will refuse to behave in a simple manner, and that, of course, is the inductor. A variable inductor required to give service over a frequency-range of four or five octaves cannot be regarded as a pure inductance. The reason is that the conductor length can be a comparable to the wavelength at some frequencies and settings, and one consequence is that the coil can be expected to exhibit a number of self-resonances. For a simple solenoid considered in isolation, the fundamental resonance occurs when the electrical length of the winding wire is λ/2. From the circuit engineer's pint of view, this is a parallel resonance; i.e., the impedance at the coil terminals becomes very high and purely resistive. The next resonance occurs when the wire electrical length is λ. This is a series resonance; i.e., the coil impedance becomes very low and purely resistive. Then another parallel resonance occurs when the wire electrical length is 3λ/2; and so on, ad infinitum. Thus, to summarise: the coil exhibits parallel resonances at frequencies at which the wire length is an odd multiple of electrical half-wavelengths; and it exhibits series resonances at frequencies at which the wire length is some multiple of whole electrical wavelengths. The alternating sequence of high and low-impedance resonances is qualitatively similar to the electrical behaviour of a short-circuited transmission line. Indeed, the fundamental (lowest frequency) resonance is sometines referred to as the "quarter-wave transmission-line resonance". This may seem confusing, given that the electrical length of the coil wire is λ/2 at that frequency (the SRF), but it makes perfect sense on considering that a short-circuited λ/4 transmission line consists of λ/2 of wire folded into a hairpin loop. Unlike the ideal transmission line however, the coil resonances do not follow an exact harmonic sequence, because the effective propagation velocity (the phase velocity) for an electromagnetic wave following the helix is frequency dependent (i.e., the coil is dispersive). A typical variable inductor intended for HF impedance matching applications might have a conductor length somewhere between about 5 m and 15 m. Hence, on the higher short-wave frequencies, it is perfectly possible for the coil to be operated between the SRF (λ/2) and the first series-resonance (λ), and in larger coils, the wire length may even reach as far as 3λ/2. Needless to say, the behaviour of an AMU when the coil is operating above its SRF has the potential to confuse manual operators and automatic control systems alike, and it can lead to accidental matching solutions having very low efficiency. A coil operating below its SRF has a positive reactance, and can therefore be regarded as an inductor. The finite propagation time for an electromagnetic wave travelling along the wire however causes the apparent inductance to increase with frequency, becoming infinite (i.e., open circuit, neglecting losses) at the SRF. This effect can be modelled by assuming the existence of a parallel capacitance, the self-capacitance, which remains reasonably constant at low frequencies, but becomes frequency-dependent in the region of the SRF. Hence the lumped inductor model, a pure inductance in parallel with a capacitance (neglecting losses), simulates the SRF by treating the coil as a parallel resonator. The model is qualitatively realistic up to and beyond the SRF, but since it has only one resonant frequency, it breaks down completely as the first series-resonance (at approximately twice the SRF) is approached. Above the SRF, but below the first series resonance, the reactance of the coil is negative. The coil behaves as a capacitor; but the losses are much greater than those of a true capacitor, and so the use of any matching solutions that might be found in this regime should be avoided. This is not a serious problem if the Underhill-Lewis (R, G, φ) method is used for network selection, because a positive reactance solution will be mandated by the network choice; but there is a serious risk of bad solutions if the matching strategy involves hunting blindly for minima while watching an SWR bridge. Between the first series resonance (λ) and the second parallel resonance (3λ/2), the reactance is positive again. An infinite range of effective inductances can be selected on this interval, but it should be obvious that the amount of wire used to obtain a given inductance is much greater than necessary. Hence the losses will be excessive, and a possible consequence of accidental solutions in this regime will be the overheating and destruction of the coil. Fortunately however, only very large coils will have sufficient wire to allow this situation to occur; and so, although a matter for vigilance, the problem will not necessarily arise. The issues outlined above will serve to give a general picture of the behaviour of coils, but there are complications in practice. For an isolated air-cored coil, of length greater than diameter and having a pitch distance (distance between turns) between 1.5 and 2 times the wire diameter (which is fairly typical), the helical propagation velocity will be within a few % of the speed of light at the various resonance frequencies. When the coil is put into a metal box however, the resulting coupled shorted-turn will cause all of the resonances to move up in frequency. In opposition to that; if the coil is wound onto a former, the proximity of dielectric material will cause the resonances to move down in frequency. It is also not possible to mount the coil, and wire it up, without introducing stray capacitance; and this will drive the resonances still further downwards. Overall, it is to be expected that the resonances will occur at somewhat lower frequencies than rough estimates based on unit velocity factor will indicate; which means that above-SRF operation of the inductor arm of the AMU is a possibility that has to be taken seriously. Further complications can then arise because the inductor is not always a simple solenoid. The various types of coil used in HF AMU applications are described, with example photographs, in [A3.1] and fall into five categories listed below: |
|
A variometer is a pair of inductors arranged so that the mutual inductance can be varied by rotating one coil relative to the other. A variable inductor can be realised by connecting the coils in series. When used as an inductor, the physical conductor length remains the same regardless of the inductance setting. Consequently, the relationship between SRF and setting is second-order; i.e., the SRF does not change greatly as the inductance is reduced and does not necessarily move to higher frequency. This pathology makes the series configuration completely unsuitable for use in wide-range matching networks. Also, an inductor that provides a small inductance by partial cancellation of two larger inductances cannot cancel the losses in the individual coils. As a variable-k transformer, the variometer is a useful device; but its use as a general-purpose variable inductor is a bad idea. In a roller inductor or "roller coaster", the coil is wound on a rigid cylindrical former and mounted on an axle. Rotary connections are provided for the two ends of the coil, and a movable tap is provided by means of an external wiper or rolling contact. The device is fundamentally a variable auto-transformer, but can be used as a variable inductor by connecting to the wiper and one of the ends. The arrangement has the advantage that the conductor length is reduced as the inductance is reduced, but the magnetic coupling to the unused turns is a serious drawback. If the unused turns are ignored, a high voltage can appear at the open-circuit end, leading to corona and insulator breakdown. There will also be self-resonances for the used turns, the unused turns, and the whole solenoid. The standard solution to these problems is to short the unused end of the coil to the wiper, but this leads to large circulating currents and consequent losses in the wire and slip-contacts. The term 'helipot inductor' is coined here to describe a solenoid with an axial control shaft and an internal wiper arm; i.e., the same mechanism as is used in helical potentiometers. Such coils are also called "roller inductors", but this is misleading because the coil is fixed. The coil is supported by external insulating strips or pillars; which means that there is no former, and it therefore has a higher SRF and reduced dielectric loss in comparison to a roller coil. There is also only a single wiping contact (the rotary end contacts of the roller coil are eliminated), which helps to minimise the electrical resistance. The problem of what to do with the unused turns remains however, and the standard solution is to short them to the wiper. |
|
The coil and drum (also called a "coil and bar" or a "coil and capstan") is a way of making a true variable solenoid inductor with no behavioural artifacts. Unused conductor (usually a flat silver-plated brass strip) is stored on a metal shorting drum and wound onto a grooved coil former as required. Both the coil former and the drum rotate, and a fairly complicated system of gears and tensioners is used. Electrical connections are via rotating contacts on both the coil axle and the drum axle. The nearby drum and the coil former give rise to fairly high stray and self capacitances; but the SRF moves to higher frequency as the inductance is reduced, there are no spurions resonances apart from the normal transmission-line overtones, and the absence of shorted turns results in very high Q. |
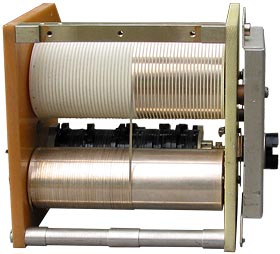 Redifon coil and bar assembly |
|
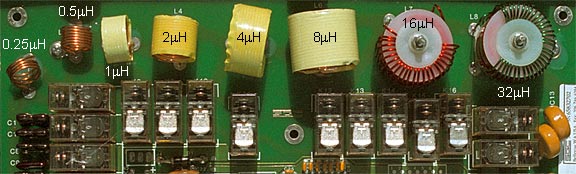
By connecting a set of inductors in series, and providing each coil with a SPST relay to short it out, it is possible to make a stepwise variable inductor. The most obvious arrangement is to make each inductance in the chain exactly twice as large as the one preceding it, so that the relay-driver transistors can be controlled directly using binary data. In the most basic implementation; the binary register is an up-down counter, clocked at about 20Hz, with its count direction controlled according to the output of a nulling bridge. Microcontroller-based control systems are, of course, more versatile, and the binary count can be converted into a direct inductance readout. The smallest inductance step can be arbitrarily small in principle; although monotonicity of the relationship between the inductance and the binary representation depends on the assumption that inductance does not vary with frequency. This means that each individual coil should be operated well below its SRF. |
 Racal VRA549c Vacuum relay switched Pi/L network AMU for 500W HF transmitters |
|
|
|
From the foregoing summary; it can be seen that, for the AMU
application under consideration here, the use of variometers
should be rejected outright. Also, in a perfect world, we might
reject roller coasters and helipot inductors for confronting
us with the sorry choice between in-band spurious resonances
or high eddy-current losses. Unfortunately however, inductors
based on the variable autotransformer principle remain the easiest
to obtain on the commercial, surplus and secondhand markets,
and so continue to be used. In mitigation, it should be noted
that the earlier-given efficiency calculations were based loosely
on the performance of shorted-overwind autotransformers, and
in most cases were acceptable. Also, by adding more complexity
to the control system, it might be possible to improve matters
by using a relay to short the overwind only in situations in
which high-voltage breakdown is likely to occur. For a continuously variable RF inductor, the best choice by far is the coil and winding drum. Such devices have been in use for many years in military and aviation applications; but have failed to appear on the commercial markets presumably for reasons of cost. Inspection of the various offerings however gives the impression that no one has really tried to optimise the design for production. Considerable complexity lies in the end-stop system, which typically relies on some kind of mechanical counter to determine when the coil-former is nearly full or nearly empty. This however could just as easily be done by having plastic levers to be moved aside by the conductor and thereby operate cams or limit switches. With the use of standard gear parts for the drum synchronisation, and a relatively simple clock-spring tensioner (inside the shorting drum), the mechanical system is within the capabilities of any workshop with a screw-cutting lathe. The springy silver-plated brass strip presents a sourcing problem, but the use of twisted multi-strand or braid conductor is a possible alternative. The binary-switched inductor chain, although not a true continuously variable inductance, turns out to be a fairly good choice for HF automatic impedance-matching applications. The inability to select an arbitrary inductance is offset by the fact that radio transmitters do not need to operate at exactly 1:1 SWR. Also, except perhaps for the largest inductances in the series, the SRFs of the individual coils can easily be placed well above the operating range; and the larger coils are only likely to be used at lower frequencies. The lack of mutual inductance between the separate coils means that the AC resistance of the chain is likely to be somewhat higher than that of a single solenoid solution, but that disadvantage is negated if the alternative is a shorted-overwind autotransformer. Overall, assuming good design practice, the losses can be expected to be intermediate between those of a helipot inductor and a coil and drum; but with the advantage of easy interface to a microcontroller and very rapid (20ms) inductance selection when loading data obtained from pre-determined matching solutions. For more discussion of the switched inductor chain method, see the author's SGC230 article. |
|
3: General considerations: A fully-automatic impedance matching system can never provide an exact solution. This is because the comparator circuits or servo networks that monitor the process must have a dead-band or window, within which a particular impedance-related measurement (R, G, φ, |Z|, SWR) can be said to be 'good enough'. The acceptance window can be arbitrarily narrow in principle, but must be finite in order for the matching process to terminate. The desired matching criterion is generally <1.2:1 SWR for professional systems, but might be as as lax as 2:1 SWR for equipment aimed at the amateur market. The 2:1 criterion is adequate for a transceiver with a built-in limited-range matching network, and for valve linear amplifiers with manual pi-tank controls, but is not good enough for an unattended transmitter. In general, an SWR of better than about 1.4:1 is needed in order to guarantee the dormancy of any transmitter protection circuitry. Using binary-switched inductors and capacitors, it is relatively easy to meet the 2:1 matching criterion, but the design problem becomes progressively more difficult as the acceptance window is narrowed. The issues are of step-size and monotonicity; i.e., ensuring that the component values are sufficiently accurate and the layout is good enough to guarantee that the inductance or capacitance will always increase when the corresponding binary number is incremented by 1 (as you walk up a staircase, every step should be higher than the one preceding it). A particular problem is that monotonicity can always be achieved at one frequency, but will not hold over a wide frequency range unless care is taken to ensure that the inductances and capacitances are constant. This means that the capacitors used must have very low inductance (disk ceramic types with short leads is a good choice) and the inductors must have low self-capacitance relative to the inductance (highest possible SRF). For the smaller solenoid inductors, the SRF can be maximised by using a length / diameter ratio of about 1 and closely-spaced turns (although this does not maximise the Q). For the larger inductances, coils with toroidal carbonyl-iron cores give high Q and high SRF, but are unsuitable for high-power applications and can cause a small degradation in receiver intermodulation performance. Hence, despite its attractiveness from a control systems point of view, the binary approach is one that requires careful design and construction if it is to be made to work well. Another drawback of binary switching is the large number of relays involved. If the power throughput requirement is modest (say, a couple of hundred watts), then conventional relays can be used; but for powers of around 1 kW, vacuum relays are indicated, and the cost of new parts becomes astronomical. What with that, and the encroaching monotonicity problem as the coils (and hence their self capacitances) are made larger, there comes a point at which the use of continuously variable components becomes preferable. Motorised inductors and capacitors are slow-acting. A well designed system will typically take about 5 s to implement a previously stored solution, whereas a binary-switched system can do it in 20 ms. There are numerous advantages however, particularly: high efficiency (if the components are a vacuum capacitor and a coil and drum); precision (the 1.2:1 SWR criterion is not difficult to achieve); and two that warrant further explanation: unlimited inductance and capacitance; and the possibility of semi-automatic operation. A human operator will always experience difficulty in determining a matching solution, but can easily obtain a 1:1 SWR once a solution is approached. An automatic system, on the other hand, can easily find a solution, but will always terminate the adjustment process once the SWR has fallen below a preset level. A continuously variable AMU can offer the best of both worlds, by having both motors and control knobs. If the matching criterion is sufficiently tight, the AMU can perfectly well operate unattended, but a final tweak from an operator will generally give a small increase in both efficiency and radiated power. When using switch (or relay) configurable L-networks, there are at least two matching solutions for every load impedance. The best solution is that which involves the shortest route across the Z-plane, but as can be seen from the example efficiency calculation given earlier, the primary choice may prove to be unavailable at low frequencies due to insufficient inductance or capacitance. A design issue is therefore whether or not to strive for the maximum possible efficiency when using an electrically-short antenna. A commercial designer might say no, but a professional designer or a home constructor will be more likely to favour performance over cost. For the capacitive arm of an L-network, a 10 pF to 1000 pF vacuum capacitor is sufficient for the majority of HF antenna matching situations. At the low frequency end of the spectrum however, there might be a need for larger capacitances if the shortest-path solution is always to be used. One way in which the range can be increased is by providing switches or relays to add capacitance in multiples of the difference between the minimum and maximum settings of the variable capacitor. To illustrate the point, consider a 10 pF - 1000 pF variable capacitor, that has a switch S1 to place 990 pF in parallel, and a switch S2 to place 1980 pF in parallel. The available adjustment ranges are then: |
|
|
|
|
Adjustment range / pF |
|
|
|
|
10 - 1000 |
|
|
|
|
1000 - 1990 |
|
|
|
|
1990 - 2980 |
|
|
|
|
2980 - 3970 |
|
Complete coverage from 10 pF to 3970 pF is thus achieved. Observe
also that the 2-bit binary number that represents the relay states
can be incremented or decremented according to signals obtained
from limit switches attached to the variable-capacitor drive
mechanism. This means that the capacitor assembly can be operated
as an autonomous subsystem; i.e., the main control algorithm
can work on the assumption that the device is continuously variable. One matter for caution when using parallel capacitances to extend adjustment range however is that there must be no gaps in the coverage if the system is to be automatically controlled. The issue is that of what happens if a matching solution corresponds to a capacitance that lies between two non-overlapping ranges. Say, for example, that the required capacitance is slightly larger than that available in the presently selected range. In that case, the variable capacitor is driven to its maximum value and a limit switch operates, causing a fixed capacitance to be added. The total capacitance is then too large, and so the drive motor reverses; but because there is a gap in the coverage, the lower limit switch operates before the required capacitance is reached. This causes the the previously added capacitance to be removed, and the motor reverses once again. The outcome is that the search repeats ad nauseam and the matching process never terminates. If the coverage gap is small, the finite acceptance window for the adjustment will reduce the probability of such occurrences; but the sharpness of the null depends on the antenna impedance, and so termination can never be absolutely guaranteed. The only true solution is to ensure that the fixed capacitance increment is no greater than the adjustment range of the variable capacitor, in which case, there may be overlaps in the ranges, but never any gaps. Overlaps are not toxic to the adjustment process, but should be kept reasonably small because they reduce the maximum available capacitance. If the range of a variable capacitor can be increased by adding fixed capacitors in parallel; it might seem reasonable to try to increase the range of a variable inductor by adding fixed inductances in series. This however, is a very poor approach, as can be understood by considering the requirements for size and placement of the additional coils. A better solution is to connect a high-voltage capacitor in parallel with the coil, as can be demonstrated with a little revision of basic electrical theory. Assuming that the system is operating below its resonant frequency, the effective inductance, L' say, of an inductance in parallel with a capacitance, is given by dividing the reactance by the angular frequency. Thus: L' = ( XL // XC ) / (2πf) Expanding the parallel product we get: |
|
|
2πf |
[ 2πfL - 1/(2πfC) ] |
| which by multiplying top and bottom by -1 and simplifying, gives: |
|
|
1 - (2πf)² L C |
13.1 |
|
When the frequency is very low, L' is the same as L. The second
term in the denominator however, should be recognised as being
related to the electrical resonance formula; i.e., it goes to
1 at the resonant frequency. Hence the denominator goes to zero
at resonance, and L' becomes infinite. Now, if we assume that L is the maximum (nominal, low frequency) inductance setting of a variable inductor; it transpires that, at any given frequency, there is a critical value of parallel capacitance that will make the effective inductance infinite at the maximum inductance setting. That capacitance can be determined from the condition: (2πf)² L C = 1 i.e.: C = 1 / [ (2πf)² L ] Thus, for example, if we have a 50 μH inductor and we want the effective inductance to be infinite at 1.8 MHz, that can be achieved by placing a total of 156 pF in parallel (including strays and the self-capacitance of the coil). . |
|
>>>>>>>>> writing in progress >>>>> Starting point for series inductance is 0. Optimum starting point for parallel inductance is the PRF, but difficult to locate. - variable inductors Effective inductance of the variable inductor goes to infinity at the SRF. The Q then goes to zero, but AMU efficiency can still be high. It depends on the dynamic resistance. SRF can be reduced using a small parallel capacitor. . |
|
High voltage ceramic capacitors: AVX . CalRamic . Kemet . Murata . |
|
|
© D W Knight 2009.
David Knight asserts the right to be recognised as the author of this work.
|
|
|
|
|
|
u